


Etwas unglücklich mit der im X525 beigepackten KK5.5 Platine hab ich recht schnell den Umbau auf die KK2.0 von Hobbyking umgebaut. Hier der Bericht darüber.
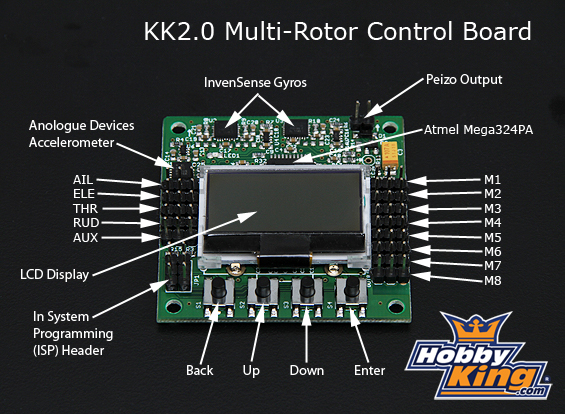
Die KK2.0 Platine von Hobbyking
Die KK2.0 ist wohl einer der Flightcontrol Bestseller am Markt. Hobbyking hat sich hier eine geniale Flightcontrol entwickeln lassen und verkauft diese hervorragende Platine für wenig Geld. Sie hat 3 Gyros und 3 Accelerometer guter Qualität, einen recht schnellen Prozessor und kann bis zu 8 Motoren ansteuern. Mit der neuesten Firmware lassen sich über die Motorausgänge 7 & 8 auch Servos für eine Kameraaufhängung ansteuern. Das was die KK2.0 aber wohl zum Bestseller gemacht hat ist das Display und die hervorragende Menüführung mit der sich direkt am Flugfeld sehr viele Einstellungen tunen und durchprobieren lassen. Nach ausgiebigem Testen mit 2 verschiedenen Multicoptern hat sich meine Begeisterung für die KK2.0 kein bisschen gelegt. Klare Kaufempfehlung.
Den X525 umbauen
Glücklicherweise hat sich die quadratische Platine mit 55mm Seitenlänge als so etwas wie ein Standard bei den Flightcontrols etabliert, weshalb die Platine einfach auf die selbe Befestigung wie die KK5.5 kommt. Allerdings ist die KK5.5. mit einer Ecke in Flugrichtung und die KK2.0 mit einer Seite in Flugrichtung einzubauen. Somit wird nach dem Umbau aus einem X ein +-Copter und umgekehrt, ausser man dreht die ganze Befestigung um 45°. Auch die Motorbelegung ist etwas anders. Diese kann bei der KK2.0 komfortablerweise direkt am Display abgerufen werden. Ich hab auf einen Plus-Quadrocopter umgebaut.
Zuerst wird die Platine so angeschraubt, dass die 4 Tasten nach hinten (gegen Flugrichtung) schauen. Jetzt kann man das Bord gleich mal mit Strom versorgen indem man die Motoren ansteckt. Hier gilt für x-Quadrocopter : Motor 1: links vorne, im Uhrzeigersinn. Motor 2 : rechts vorne, gegen Uhrzeigersinn. Motor 3: rechts hinten, im Uhrzeigersinn. Motor 4: links hinten, gegen Uhrzeigersinn.
Für den Plus-Quadrocopter gilt: Motor 1: vorne, im Uhrzeigersinn, Motor 2: rechts, gegen Uhrzeigersinn, Motor 3: hinten, im Uhrzeigersinn, Motor 4: links, gegen Uhrzeigersinn. Das Minuskabel (GND) ist beim KK2.0 immer aussen.
Der Empfänger wird analog der Grafik genauso wie die KK5.5 angeschlossen. Hat man einen 5. Kanal zur Verfügung kann man hier den AUX Eigang anschliessen, wodurch man später mit Kanal 5 den Flugmodus umstellen kann. Aber dazu später. Minus wieder aussen.

Inbetriebnahme des X525 mit KK2.0 Platine
Jetzt wird mal getestet ob alles so ist, wie es sein soll. Dazu den Copter an den Akku hängen. Es sollte der Platine aufleuchten. Am Display steht „SAFE“. Dies bedeutet, dass die Flugfunktion abgeschaltet ist und aus Sicherheistgründen kann man nur im gesicherten Modus ins Menü. Durch Drücken der Taste unten rechts kommt man ins Menü. Mit den beiden mittleren Tasten kann man jetzt durchscrollen. Zuerst wählt man das gewünschte Motorlayout (Load Motor Layout). Ich verwende hier Plus Quadrocopter. Hier kann man noch einmal kontrollieren ob man seine Motoren und die richtigen Drehrichtungen hat. Dann geht man noch in das 2. Menü (Receiver Test) und schaut ob alle Kanäle richtig empfangen werden, oder ob man an der Fernsteuerung einen Kanal umdrehen muss. In diesem Menü kann man die Fernsteuerung auch optimal trimmen so dass alle Kanäle bei Mittelstellung auf Null sind. Restliche Einstellungen kommen später.

Dann sollte man noch die Basistests machen (wie in der Anleitung mit der KK5.5 beschrieben). Also Copter in die Hand nehmen und testen ob er auf Bewegungen durch die Hand richtig gegenlenkt.
Prinzipiell ist der X525 mit KK2.0 schon wieder einsatzbereit. Die Werkseinstellung der KK2.0 ist für den X525 Quadrocopter schon recht gut geeignet und der Copter ist damit ganz gut flugfähig. Das Feintuning macht man dank dem Display direkt auf der grünen Wiese.
KK2.0 tuning am X525
Jetzt gilt es die Werte des KK2.0 so zu tunen, dass die Flugeigenschaften möglichst optimal werden. Mit oben getätigten Grundeinstellungen kann man schon mal versuchen vorsichtig abzuheben. Ruhig fliegen wird der Quadrocopter erst in einer Höhe von ca. 40cm, wenn der Bodeneffekt und Verwirbelungen vom Boden nicht mehr zu tragen kommen. Hat man das Gefühl der Copter funktioniert und alle Motoren drehen richtig etc. wird man irgendwann nicht umhinkommen mal beherzt Gas zu geben damit er richtig abhebt. Dass der Copter bei ganz wenig Gas etwas dazu neigt in eine Richtung zu kippen ist normal.
Die wichtigste Einstellung für die KK2.0 sind die P und I Werte der einzelnen Achsen. Was das ist habe ich hier beschrieben. Die Grundeinstellungen sind für den X525 Quadrocopter schon mal fliegbar. In der Originaleinstellung sind Roll und Pitch „gelingt“. Also wirken sich Einstellungen an der einen Achse auch auf die andere aus. Dies macht bei einem symmetrischen Quadrocopter wie dem X525 durchaus Sinn und das kann man mal so lassen. Will man das nicht, so kann man im Menü „Misc Settings“ „Link Roll Pitch“ auf No setzen. Wie man die Werte erfliegen kann ist eine eigene Wissenschaft und ich schraube bis heute immer wieder mal an den Werten rum. Setzen muss man den P und den I Wert, sowie jeweils ein Limit.
Die Limits geben an wieviel Prozent der Motorleistung für die Korrektur zur Verfügung stehen. Empfehlen kann man Werte für alle Achsen um die 20. Auch deutlich mehr kann aber geflogen werden. Probleme ergeben sich bei zu Hohen Limits für die Yak Achse, weil bei voller Ausnutzung der Limits keine Leistung mehr für andere Aufgaben zur Verfügung steht, wodurch der Copter beginnt „Mucken“ zu machen. Hohe I-Limits bringen den Copter langfristig wieder in seine „Solllage“ zurück, wenn er durch Wind etc. gestört wird. Zu hohe I-Limits verursachen hier ein „langfristiges Übersteuern“.
P-Werte Pitch/Roll
Beim PI Tuning sollten zuerst die P-Werte für Pitch / Roll erfolgen werden. Dazu I auf ca 15-20 lassen und P-Werte nach und nach rauf setzen. Der Copter wird immer stabiler. Zu hohe P-Werte hat man, wenn der Copter beginnt sehr schnell zu schwingen, wenn Störungen auftreten. Ich fliege dazu den Quadrocopter auf gute Höhe, lasse ihn dann einige Meter fallen (Achtung! Immer ein gewissen Grundgas geben. Nicht das Gas ganz weg nehmen.) und fange ihn dann mit viel Gas ab. Durch dieses Manöver entstehen zwangsläufig Störungen und Verwirbelungen und hier erkennt und hört man wenn der Quadrocopter zu schwingen beginnt. Bei extremen Störungen ist es auch noch ok, wenn der Quadrocopter 2-3 mal hin und her schwingt, er muss sich aber sehr schnell wieder fangen. Ich kann bei meinem X525 noch P-Werte bis ca. 280 fliegen, das hat aber wenig positiven Effekt für die Stabilität, weshalb ich normal so mit 150 P-Wert für Pitch und Roll fliege.
I-Werte für Pitch/Roll
Dann kann man den I-Wert suchen. Beim I-Wert legt man den Quadrocopter in Schräglage und schaut ob er in dieser bleibt, oder ob er sich selber langsam wieder geraderichtet. Richtet er sich langsam wieder horizontal aus, ist der I-Wert zu gering. Nachdem der Copter dabei leider recht schnell wird kann man das nicht allzulange testen, aber es geht. Zu Hohe I-Werte äussern sich in einem Schwingen, das deutlich langsamer ist als das „P-Schwingen“. So sucht man sich gute Werte. Der Copter sollte dann richtig am Steuerhebel hängen. Blitzschnell reagieren und gut steuerbar sein. (Ausser Drehungen, die man erst mit der Yak Achse einregelt.)
P & I Werte für Yak Achse
Jetzt geht es um P und I für die Yaw Achse. Hier sei allgemein bemerkt, dass der Copter dreht indem er die beiden Rotoren, die in eine Richtung drehen schneller macht, die anderen beiden langsamer. Um den Copter stabil zu halten ist das nur in einem gewissen Ausmaß möglich. Nachdem der X525 nicht ganz leicht ist und im Verhältnis recht kleine und leichte Rotorblätter besitzt können diese Drehungen rein physikalisch nicht extrem schnell sein. Der Quadrocopter wird sich also nie blitzartig um die Z-Achse drehen, sondern das ist immer etwas träge. Die P-Werte stellt man so ein, dass halbwegs ein Optimum erreicht wird, die I-Werte werden erhöht, bis man das Gefühl hat der Copter bleibt auch längerfristig gut ausgerichtet. Setzt man die Werte, vor allem aber die Limits zu hoch und dreht mit maximaler Geschwindigkeit, dann reagiert der Copter mit schlechter Steuerbarkeit während des Drehens und unerwünschten Reaktionen wie plötzlichem Hochsteigen etc. Auch hier gilt es gute Werte zu erfliegen.
Was gute Werte sind hängt extrem von Flugweise, Gewicht, und vielem mehr ab. Somit ist es schwierig „gute PI Werte“ anzugeben. Die Einstellungen beeinflussen sich auch untereinander. Ich bin den X525 schon mit P-Werten bis 250 gut geflogen, fliege aber dann auch wieder Einstellungen mit 120. Ist alles Geschmacksache.
Bei der KK2.0 hat man noch zahlreiche weitere Tuningmöglichkeiten. Nachdem der Artikel aber ohnehin schon recht lang geworden ist und man mit PI-Tunig schon mal recht ordentlich fliegen kann, kommt das in einen anderen Artikel….